
「世界で初めて小天体表面を移動探査したロボットの開発」で、JAXAの研究者を代表とするグループ(JAXA所属3名、企業1名)が、一般社団法人日本航空宇宙学会の推薦を頂き、令和4年度文部科学大臣表彰 科学技術賞(開発部門)を受賞しました。
文部科学大臣表彰は、科学技術に携わる者の意欲の向上を図り、我が国の科学技術の水準の向上に寄与することを目的として、顕著な成果を収めた者を表彰するものです。
科学技術賞(開発部門)は、我が国の社会経済、国民生活の発展向上等に寄与し、実際に利活用されている画期的な研究開発若しくは発明を行った者が対象で、個人またはグループに贈られます。
受賞者(所属は現職):
吉光 徹雄 JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授
久保田 孝 JAXA宇宙科学研究所 宇宙機応用工学研究系 教授
冨木 淳史 JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授
足立 忠司 (株)セシアテクノ 代表取締役
受賞者代表のコメント:
はやぶさ2探査機に搭載した2台のロボット"ミネルバ2 ローバ1A(イブー),ローバ1B(アウル)" は 2018年9月から10月にかけて、小惑星Ryuguの表面を移動探査することに成功し、世界で初めて太陽系小天体の表面移動探査をしたロボットとなりました。また、我が国にとっても初の地球外天体表面探査ロボットであり、惑星探査の新たな段階へ進めたことを誇りに思っています。
「イブー」と「アウル」はホップしながら小惑星表面を移動しました。ホッピング移動メカニズムは、小惑星表面などの微小重力環境において、車輪型移動メカニズムなどと比較してメリットがあり、提案した移動メカニズムを小惑星表面で実証できました。表面重力の非常に小さい小惑星表面Ryuguと同等の環境は地球近傍には存在せず、これまでに人類が確立してきたさまざまな移動手法とは異なる技術を確立する必要がありました。
2つのロボットは地球から制御することなく完全自律的に表面を移動探査しました。ロボットの搭載コンピュータの処理能力が非常に低いため、自律動作アルゴリズムは簡単なものですが、運用時には座っていればローバの取得したデータが届いたため、格段に手間が省けました。もっともこれは、はやぶさ2運用チームが探査機運用を完璧に行なっていたためであり、多くの人の尽力により偉業が達成できたことに感謝しなければなりません。ただ、思ったより大量の画像が送られてきたため、その後の処理は非常に大変でした。運用だけでなく、地上データ処理の省力化も重要でした。
【吉光 徹雄 プロフィール】
これまで月や火星などの重力の大きい天体から小惑星など重力の小さい天体まで、太陽系に存在する天体の表面を探査するロボットに関して、移動メカニズム,自己位置同定,知能化など必要な技術の研究をしてきました。
博士号取得後、初代小惑星探査機はやぶさに搭載したミネルバで経験を積み、はやぶさ2ではミネルバ2という小天体表面探査ロボットシステムを開発し、2台の双子ローバを搭載しました。現在は月探査ロボットなどの研究・開発を行なっています。
【久保田 孝 プロフィール】
大学院時代に移動ロボットの知能化の研究を行いました。その後、2年間、富士通研究所にて画像処理の研究に従事した後、宇宙科学研究所にて、宇宙工学研究を開始。今までにM-Vロケットの姿勢制御装置の開発、小惑星探査機「はやぶさ」の航法誘導、小惑星探査ロボット「ミネルバ」などの研究開発・プロジェクトに携わりました。残念ながら「ミネルバ」は小惑星イトカワに着陸できませんでしたが、今回「ミネルバ2」が小惑星リュウグウの着陸に成功、移動探査を実現できて感無量です。
現在なお、宇宙探査ロボティクスや宇宙人工知能を中心に探査ロボットの知能化に関する研究を推進しています。今後も、賢い探査ロボットが太陽系の謎を解き明かすことを期待しています。
【冨木 淳史 プロフィール】
博士課程では、主に超広帯域ワイヤレスシステムの研究を行い、また大学時代を通じて医療用テレメータの開発に関わってきました。
宇宙研入所後、探査機やロボットの活動領域を広げ、より多くの知見が得られるようより高い周波数のKa帯トランスポンダや超小型衛星向けの搭載通信システムの開発、また深宇宙探査用地上局の開発に深く関わってきました。この他にも衛星の軽量化を実現するフライバイワイヤレスの研究をおこなっており、博士課程での経験が多く生かされています。
現在は、集積化による通信機の小型軽量化や低消費電力化に向けた新プロセスの増幅デバイスの評価、また高信頼制御通信・測位・給電統合型のワイヤレスシステムの研究開発に取り組んでいます。
【ミネルバ2 探査ローバシステム(フライトモデル) 】 (画像クレジット:JAXA)
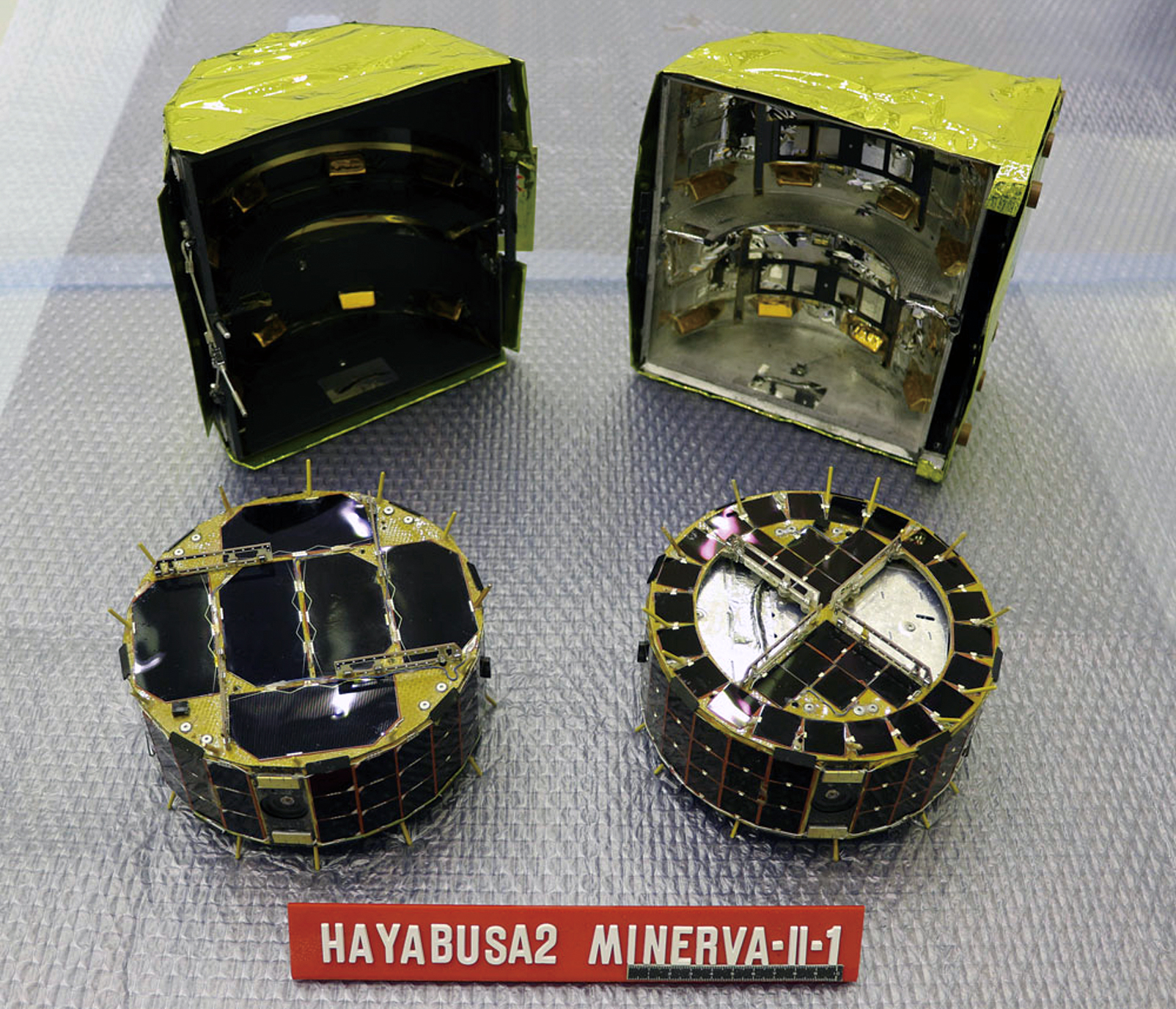
左下:ローバ1A、 右下:ローバ1B 左上:分離装置OME-B、右上:分離装置カバーOME-C
【ミネルバ2 が撮影した画像】 (画像クレジット:いずれもJAXA)

1. 「はやぶさ2」から分離したときに撮影
日本時間9月21日13時8分頃に撮影。カラー画像。撮影はローバ1Aから。ローバが回転している状態で撮影しているため画像がブレているが、画像の下部分にリュウグウ、上部分に「はやぶさ2」の機影が確認できる。

2. 「はやぶさ2」から分離したときに撮影
日本時間9月21日13時7分頃に撮影。カラー画像。撮影はローバ1Bから。右下にリュウグウが写っている。左上の薄くモヤがかかっている部分は撮影時の太陽光の写り込みによるもの。

3. リュウグウ表面において移動中(ホップ中)に撮影
日本時間9月22日11時44分頃に撮影。ローバ1Aがリュウグウ表面において最初にホップして移動しながら撮影したカラー画像。左側半分がリュウグウの地表面。右側の白い部分は太陽光によるもの。
からの記事と詳細 ( 令和4年度 文部科学大臣表彰「科学技術賞」を受賞 「世界で初めて小天体表面を移動探査したロボットの開発」 | 宇宙科学研究所 - JAXA 宇宙科学研究所 )
https://ift.tt/WVTrIO6
科学&テクノロジー
No comments:
Post a Comment